|
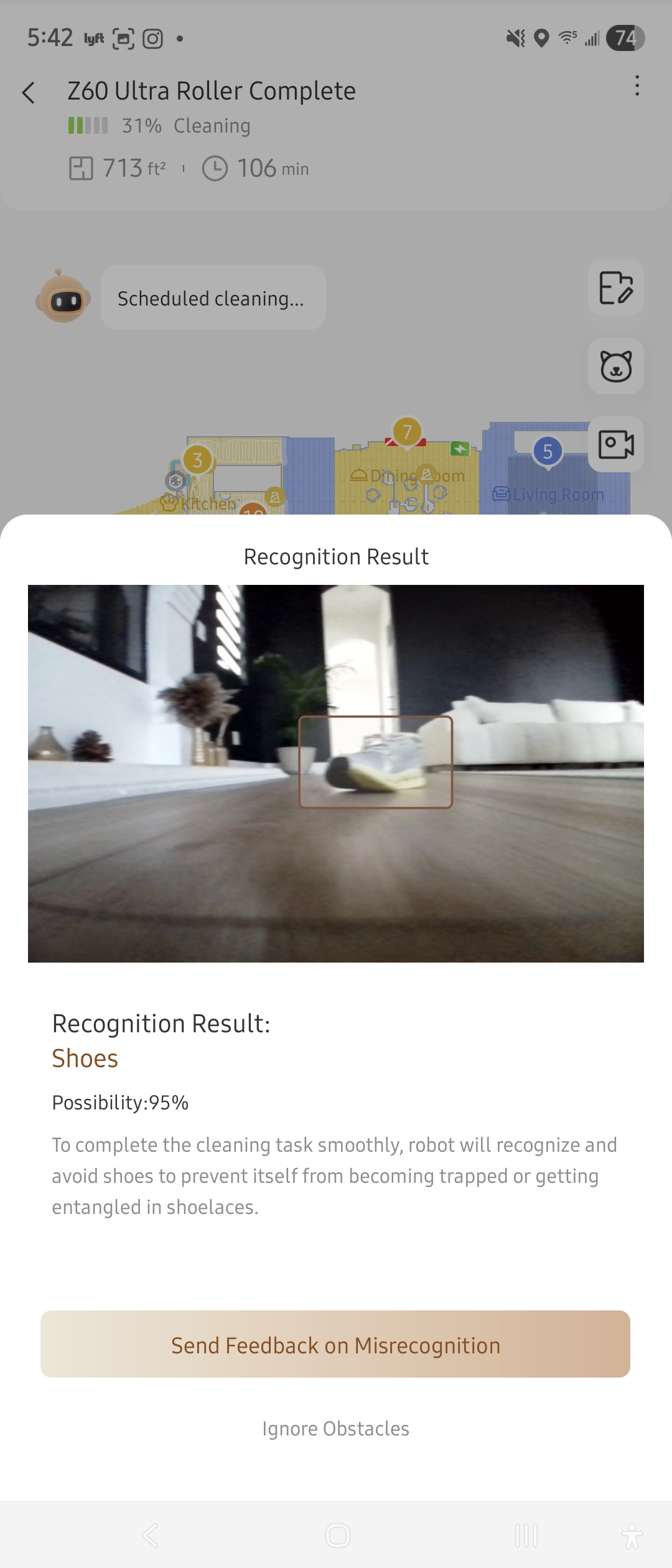
One feature I’ve been curious about while using the MOVA Z60 is its obstacle recognition system, especially when the robot encounters everyday items left on the floor.
During several cleaning runs, the robot encountered objects like shoes and power cords, and it was interesting to see how the system handled them. Instead of getting stuck or tangled, the robot recognized these obstacles and adjusted its path to move around them.
The MOVA app also displays the detected object type and even shows a confidence percentage for the recognition result. In one case, the robot identified a cable with about 86% probability, and in another run it detected shoes with a higher recognition confidence.
This kind of detection helps prevent the robot from getting caught in situations that normally cause older robot vacuums to stop mid-clean. It also helps the robot complete the cleaning cycle more smoothly without needing manual intervention.
After multiple runs, it’s clear that the Z60’s navigation system is designed to balance cleaning coverage with obstacle avoidance. Instead of aggressively pushing through objects, it identifies them and adjusts the route to continue cleaning the rest of the area.
Small features like this make a noticeable difference when running the robot on a regular schedule, especially in homes where items like shoes or charging cables might occasionally be left on the floor.
Seeing the detection results directly in the app also adds a layer of transparency to how the robot interprets its surroundings during each cleaning cycle.
#GetYourZ60
#Z60URC TranslateView Original Text
|  US
US
 394
394